测绘地理信息:倾斜航空摄影技术设计与成果质量检验
文章发布于:2020-06-03 作者:admin 浏览次数:次
① 基本概念回顾
(1)什么是倾斜摄影技术
倾斜摄影技术是通过在飞行平台上搭载多台传感器,同时从一个垂直、四个侧视等不同角度采集影像。我们可以将它理解为一项进化了的摄影测量技术,它比传统的摄影测量多了四个倾斜拍摄角度,从而能够获取到更加丰富的侧面纹理等信息。
(2)数码相机相对位置
倾斜航摄仪集成一个下视相机和多个倾斜相机,中央一个垂直对地观测,获取垂直影像,于该相机4个正交方位分别以一定的倾角放置一个相机。
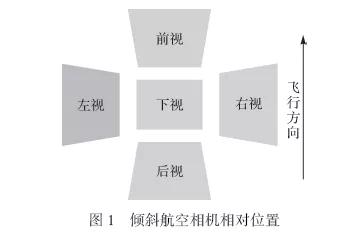
由于倾斜航摄仪拍摄模式的特殊性,相机间的相对关系对于地物覆盖范围、倾斜影像分辨率变化范围、相邻曝光点影像重叠度、集成系统空间尺寸乃至后续数据处理算法都会产生影响,因此确定相机间排布模式是首要解决的问题之一。针对多种排布可能,通过对地物覆盖范围、倾斜影像分辨率等因素进行计算与仿真,确定较优的排布模式为下视影像长边跨航线、前视、后视影像长边跨航线、左视、右视影像短边跨航线。5相机观测视野如图1所示。
相机倾角指倾斜放置相机主光轴与垂直放置相机主光轴在它们所确定的平面内所形成的夹角。根据经验及模拟测试,当倾角在40°~50°之间时,所获得的影像更接近人眼对立面纹理信息的真实视觉体验,此范围角度一般为摄影测量大倾角范围。
(3)相机安装倾角、视场角与分辨率的关系
垂直和倾斜影像的地面分辨率是倾斜航摄仪最为直观与重要的参数之一,也是直接决定后续三维建模质量的关键因素。倾斜影像自动空三时,为了保证量测点的精度,应尽量保证不同影像的分辨率一致,从而侧视影像需要裁掉远端和近端分辨率差异过大的部分,但同时为了保证影像的重叠度,航线设计时需要顾及侧视影像的分辨率。因此需对垂直与倾斜视角的影像分辨率进行组合分析。
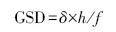
根据垂直影像GSD计算公式
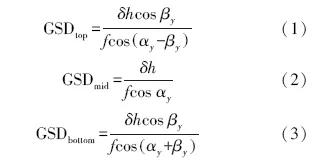
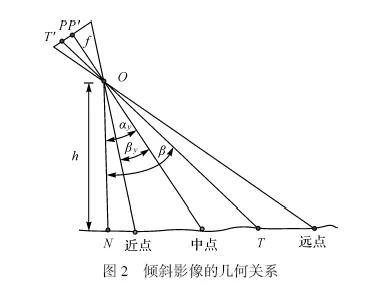
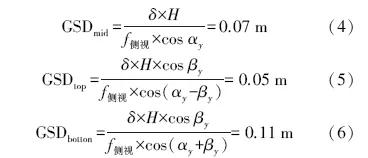
结合倾斜相机主光轴旋转角度,由图2可以得出倾斜影像中心点、近地点与远地点的大致分辨率。设倾斜影像中心点、近点和远点分辨率分别为GSDmid、GSDtop、GSDbotton,计算公式如下
式中,δ为CCD单像元大小;h为飞行高度;f为相机焦距;αy为倾角;βy=arctan (b/f) 为视场角的一半。倾斜影像的几何关系如图2所示。
以SWDC-5相机为例,当倾角为45°,视场角为40°,βy=20°,f下视=50 mm,f侧视=80 mm时,按照下视相机进行设计,当GSD=0.08 m时,H=666 m。
则侧视相机的分辨率概算为
由此可见,除飞行高度、焦距、像素大小之外,倾角也是影响倾斜影像GSD的一个重要因素。倾角越小,其远点的分辨率越高,近点、远点GSD差异也就越小,GSD指标的控制也是影响倾角设计的一个关键因素。通常,获取的倾斜影像与垂直影像中心点地面分辨率应相当,倾斜影像的最小分辨率不宜超过垂直影像分辨率的3倍。
(4)倾斜航摄相机的选择
相机选择是影像获取的关键因素之一,决定了所获取影像质量的好坏 (如影像分辨率、成像的几何精度等) 和摄影交会角的大小 (与相机视场角和摄影方式有关),将直接影响最终的量测精度。
如何搭配下视相机与倾斜相机的焦距,是影像获取的另一个关键因素。目前,通常可选用的相机焦距在50~120 mm之间。焦距较长的相机,视场角小,可以获取更多的影像纹理;焦距较短的相机,视场角大,影像变形也越厉害。选择组合相机焦距时,需要整体考虑下视相机焦距和侧视相机焦距的组合选择。
一般情况下,选择下视相机的GSD应与侧视相机的GSDmid相当
式中,α为倾角。当倾角设置为45°时,一般情况下侧视相机的焦距宜为下视相机焦距的1.4倍。因此,倾斜摄影时一般选用侧视相机的焦距比下视相机的焦距要长。
(5)平台检校
平台检校的过程是解算多视相机相对关系的过程,是获取侧视相机相对于下视相机摄影中心的相对位置关系。由于现有空三软件处理大倾角影像比较困难,实际作业时可预先解算下视相机的外方位元素,通过获知侧视相机与下视相机的相对关系,从而推算侧视相机影像的外方位元素。
以5镜头倾斜航摄仪为例,利用光束法区域网空中三角测量的原理,从影像所覆盖范围内若干控制点的已知地面坐标和相应点的像点坐标出发,根据共线方程解求4个侧视相机相对于下视相机的位置和姿态参数。
(6)倾斜影像有效像幅
倾斜影像由于其大倾角特性,导致影像边缘的分辨率较低,地物变形较大,不满足使用要求,因此在实际处理过程中将会对其进行裁减,裁减后可用的像幅称为倾斜影像有效像幅,有效像幅界定标准为影像内GSD达到指标要求的影像范围,并且在满足航线设计要求下所有倾斜影像的有效像幅联合起来能覆盖到整个测区。有效像幅占倾斜影像原始像幅的比例越大则相机参数的设计越合理。
②影响成果精度因素
(1)像控点的布设
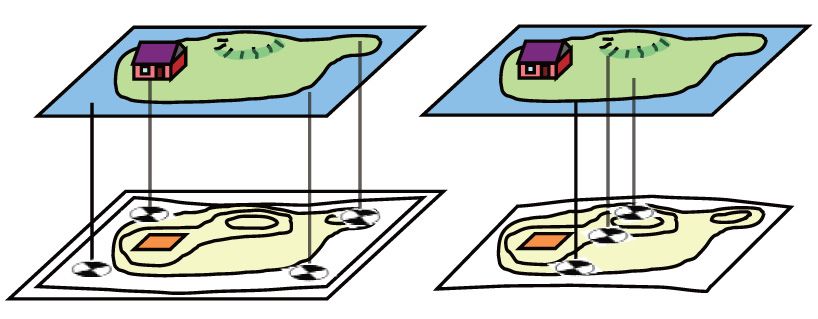
像控点的布设的好坏对后期成图起着相当关键的作用,首先,每个架次的至少需要5 个相控点。若遇到地形起伏变化较大,数目植被复杂地区需加密像控点(图1),若不加密或者分布不均匀覆盖飞行区域时,会导致翘曲(图2)、导致平差数据不能达到精度要求。
图1 像控点分布正确方式
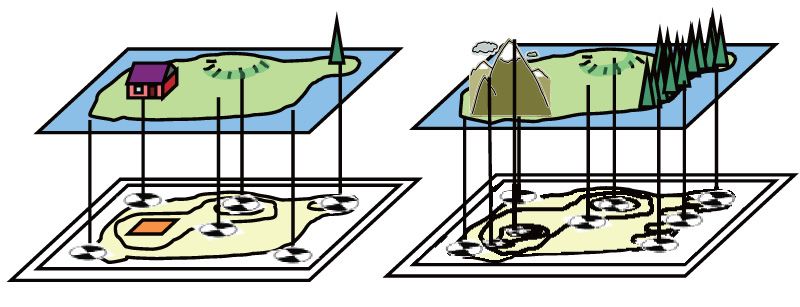
图2 像控点分布错误情况
(2)图像质量
影响图像质量的因素分为天气因素与相机本身因素;
天气因素主要是风、雾霾。当风速过大时(一般图2 像控点分布错误情况不超过5 级),应该考虑停止飞行。首先,风大会造成飞机飞行速度和姿态变化过大,导致从空中所照的照片扭曲程度过大,最终成像模糊。同时会加速飞机动能的消耗,导致缩短飞行时间,最终有可能会在有限的时间内未能完成计划区域。
相机本身因素主要是对相机的像素和曝光时间的,像素主要相机本身决定,曝光时间的选取和天气有着密切的关系,当光线条件不好的时候,应该尽量增加曝光时间,同时在选定的两个曝光时间分别照相,通过相机的ISO 数值进行比较, ISO 数值越小则相片质量越好,所以选择ISO 数值较小照片对应的曝光时间(图3,图4)。
图3 ISO 值为100

图4 ISO 值为1000
(3)重叠度
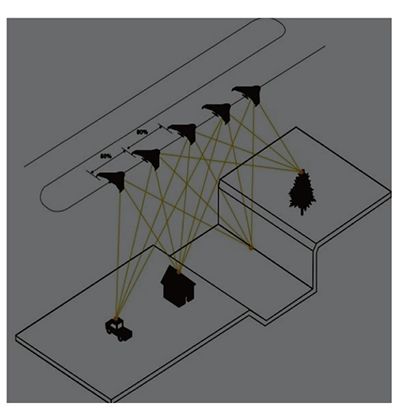
重叠率是提高相片连接点的重要保障,但是有些时候为了节俭飞行时间或扩大飞行区域,会调低重叠率。重叠率若低,每个地物点仅会在少量航片中显现,在提取连接点的量会很少,相片的连接点少自然会导致飞机的照片连接粗糙,最终导致提取的连接点平差结构弱(见图5,图6)。高的重叠率则可避免上述问题。
图5 低重合率
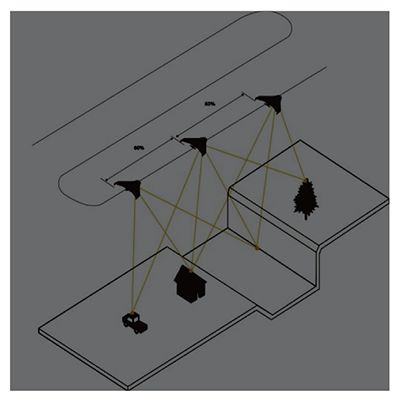
图6 高重合率
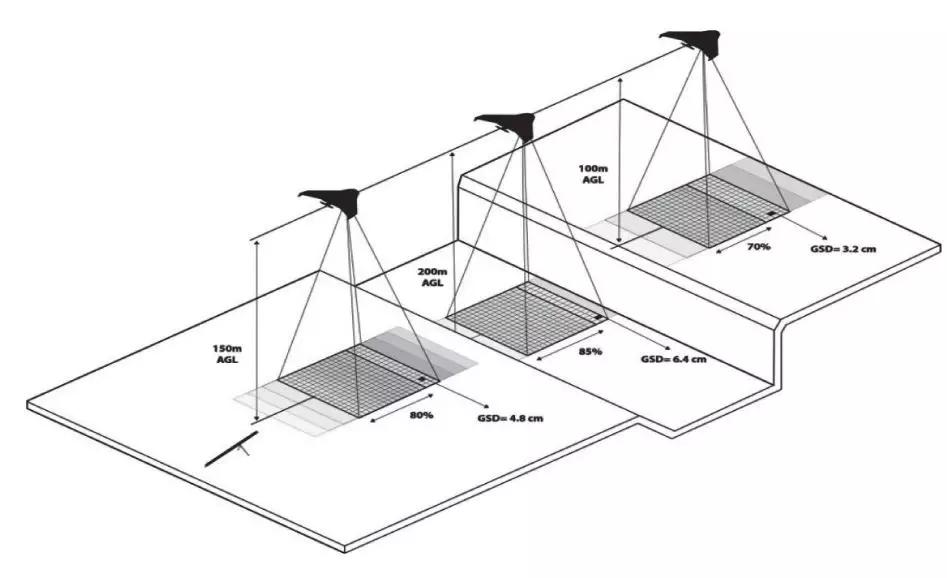
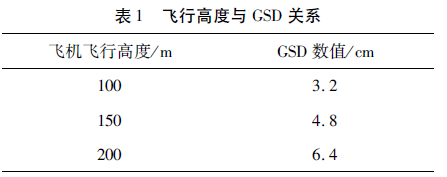
(4)飞行高度
飞行高度主要影响的是飞行航片中的GSD(每个像素的实际大小),飞行高度的变化必然会影响航片相幅的大小,以天宝UX5 为例,飞行高度与GSD的关系值(表1、图7)。通过数据可以得出,飞机离地面越近,GSD 数值越小,则精度越高。从中也发现,地面起伏变化大的地区选取合适的飞行高度对提高精度也是相当重要的。
图7 航高对GSD 的影像
③优化设计
③倾斜航空摄影技术设计
倾斜航空摄影技术设计在地面分辨率选择、航高计算等方面沿用了框幅式数码相机航空摄影的设计思路和内容;在航摄时间选择、航摄分区划分、影像重叠度与航线敷设设计、分区覆盖等方面,倾斜航空摄影与框幅式数码航空摄影存在差异。
(1)航摄时间选择设计
倾斜航空摄影的对象通常是高层建筑密集的城市地区和高差较大的陡峭山区,因此航空摄影时需要特别注意太阳高度角及出现阴影,阴影太大会直接影响影像处理的效果。太阳高度角推算摄区的摄影时间参考公式为
式中,tθ为太阳时角,单位为 (°);hθ为太阳高度角,单位为 (°);δθ为摄影日期的太阳赤纬,单位为 (°);φ为摄区的平均地理纬度,单位为 (°);Tφ为摄区地方时,单位为时。

为便于后期影像判读与处理,建议高差特大的陡峭山区或高层建筑物密集的大城市要求在正午前后1 h内进行航空摄影,阴影倍数不大于1倍。
(2)地面分辨率与航摄分区设计
在数码相机航摄时统一都使用GSD(Ground Sample Distance)概念。使用数码相机航摄时,航线设计以GSD为出发点,先由成图比例尺确定GSD,进而确定航高。在高差较小的地区航摄时,成图比例尺与GSD的对应关系如下表所示:
倾斜航空摄影为了体现真实纹理的三维实景影像,多选择建城区或有较大高差的区域作为摄区,具有航摄面积小、影像分辨率高的突出特点。一般情况下优于0.2 m,最高甚至可达0.03 m。在地面分辨率选择、航高选择与划分航摄分区时,应当重点注意以下几点:
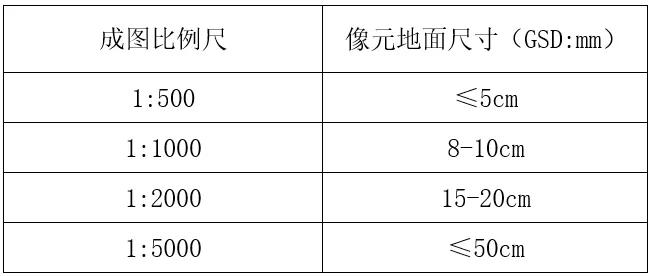
(1) 利用下视影像进行标准测绘产品生产时,地面分辨率选择需要严格遵循框幅式数字航空摄影规范的要求,1:500比例尺不超过8 cm,1:1000比例尺在8~10 cm之间,1:2000比例尺在15~20 cm之间;航摄时需要顾及地表高差影响,高差 (包含建筑物) 大于1/4相对航高时,建议分区进行航摄。如能确保航线在直线性的情况下,分区的跨度应尽量划大。
(2) 仅生产实景三维影像数据时,可根据三维影像的目视效果合理设置地面分辨率。由于高差影响,摄区内最高点和最低点的分辨率、重叠度有较大变化。根据经验,在满足最高点重叠度的前提下,最高点、最低点与基准面分辨率不超过1.5倍为宜。如果超过1.5倍,建议分区进行航摄。
(3)影像重叠度与航线敷设设计
在建筑物密集的城市地区倾斜摄影获取的影像存在严重的地物遮挡现象,为了获取全方位无信息盲点的倾斜影像,同时也为了多视影像的整体平差效果,应采取大重叠的影像获取方式。影像重叠度以下视相机为基础,与垂直摄影重叠度设计不同,倾斜航摄下视相机的航向重叠度一般不小于70%,也不宜过大,以80%以内为宜;旁向重叠度建议在50%~80%之间,可与航向重叠度相同。
(4)分区覆盖设计
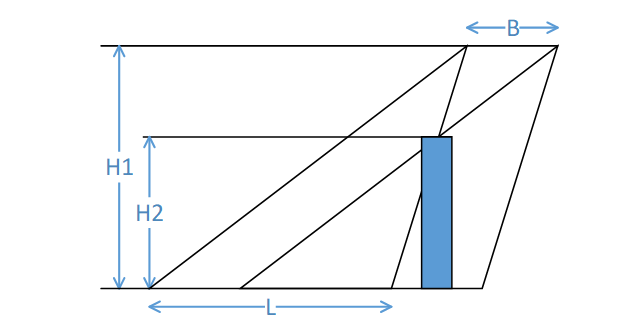
根据侧视相机倾斜角度和视场角的关系,航向和旁向覆盖超区分区边界线理论值计算公式为
式中,P为航向或旁向重叠度;θ为倾角;β为视场角。

在实际飞行中,由于大气等各因素的影响,航向或旁向覆盖超出边界线的实际值一般按照基线数=理论值+2、航线数=理论值+1进行计算。
当倾斜角为45°,视场角为40°、52°,航向和旁向重叠度均设计为70%时,超区分区边界线的理论值计算为5和4,即航摄时航带内超出7条基线,摄区范围外侧需要超出5条航线。
(5)检校场航摄设计
在IMU/DGPS辅助航空摄影测量时,需要借助飞行检校场的方法实现惯性坐标系下的直接测量数据 (位置数据X、Y、Z和姿态数据pitch、roll、yaw) 到摄影测量坐标系下的精确外方位元素位置数据 (X′,Y′,Z′) 和姿态数据 (φ,ω,κ) 的转换,以获得高精度的像片外方位元素,从而实现无或极少地面控制的航片定向和测图。
检校场区域选择应考虑以下因素:一是地势尽量平坦;二是尽量避开水域范围;三是尽量避免大面积植被覆盖;四是尽量避免有特大密集型建筑群。
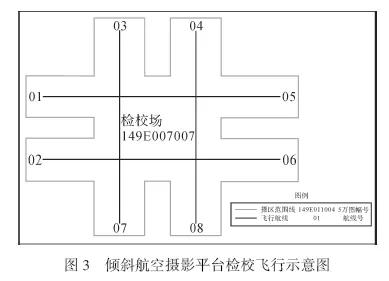
以RCD30倾斜数码航摄仪为例,航线敷设时,可采取井字形飞行方案。每条航线均十字交叉来回飞行1次,共计8条航线。设计航高可与分区作业高度相同,可设置航向和旁向重叠80%以上。倾斜航空摄影平台检校飞行示意图如图3所示。
此外,采用其他倾斜航摄仪执行时,若摄区航向和旁向重叠均不小于80%,可挑选2~3条正常航线的航片作为检校场飞行航线。
(6)航高
对于无人机搭载的数码相机而言,其焦距是购置时已知的,通常有50mm、35mm和24mm等几种,用于倾斜航摄仪的镜头焦距一般是组合存在的,用于轻小型无人机上的倾斜航摄仪的下视相机的焦距一般有20mm、25mm、28mm、35mm等几种。焦距的大小直接与航摄时的航高相关。
单像元大小&/地面分辨率GSD=焦距f/航高H,则:H=GSD*f/&
从上式可以看出,相同GSD条件下,&/f小的数码相机,所需的航高较高,对天气条件要求比较苛刻。
(7)航线外扩
倾斜航摄仪常见的是由五个单相机组合形成,数据获取时为了获取到测区范围内完整的侧面纹理,倾斜航摄仪的航线一般要完整覆盖测区需要在航向和旁向均超出一定的距离,航向方向一般是以摄影基线数量衡量,旁向方向上一般以航线数量(旁向间距)衡量。
摄影基线、旁向间距的长度与重叠度、像素数和地面分辨率有关,计算方法如下:
以选定索尼A6000相机为例,假设以传感器长边垂直于飞行方向(见下图),航向重叠度80%,旁向重叠度65%,设定地面分辨率为0.02米。
摄影基线B=4000*(1-80%)*0.02米=16米

旁向间距L=6000*(1-65%)*0.02米=42米
倾斜航线设计时,为保证数据完整、有效获取,可以根据侧视相机倾斜角度和视场角的关系,计算出航向和旁向覆盖超区分区边界线理论值为
式中,P为航向或旁向重叠度;θ为倾角;β为视场角。
在实际飞行中,由于大气等各因素的影响,航向或旁向覆盖超出边界线的实际值一般按照基线数=理论值+2、航线数=理论值+1进行计算。
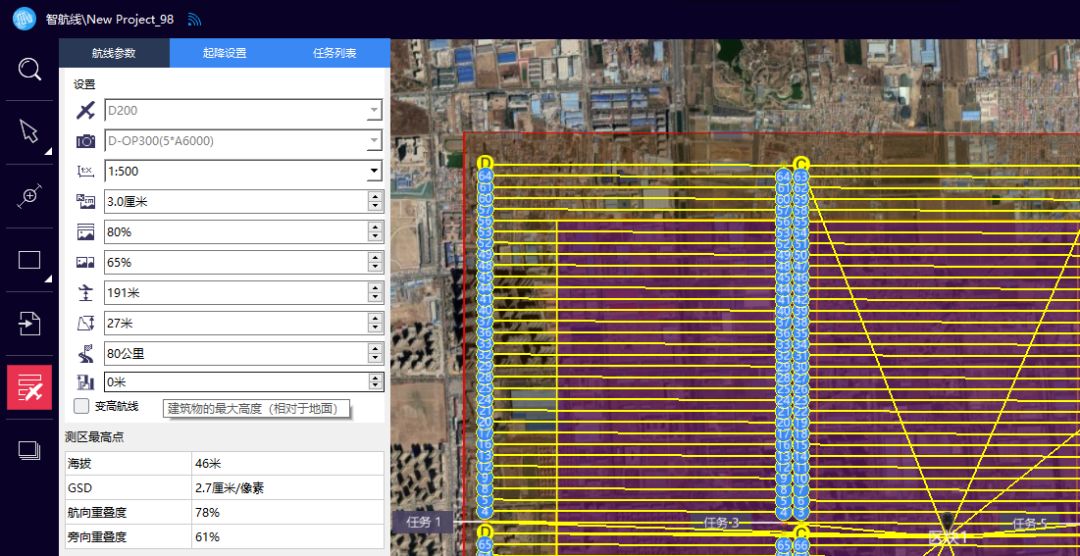
(8)变高航线设计
三维模型的质量最重要的因素就是分辨率;另外倾斜摄影的模型高程精度一般是地面分辨率(GSD)的三倍,如果生成的正射影像的分辨率是5cm,那模型的高程精度基本就是15cm,最大限差为2倍中误差即30cm,所以为了得到满足精度要求的倾斜模型,GSD就有一定的限制。
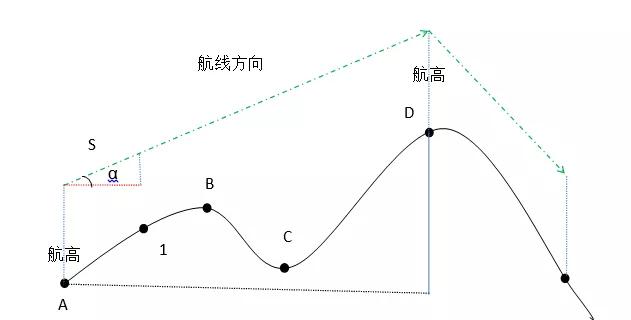
对于丘陵、山区、高山区、由于存在一定的高差,如果按照等高的形式进行航线设计,为了保证飞机安全,则会受到测区内最高点的高程的影响,一般会按照测区最高点的高程+安全距离的方式完成航线设计,这种航线设计的方式明显增加了飞行高度,降低了GSD,进而降低了高程精度及模型质量,而且这种情况会随着测区高差的变化而发生变化。
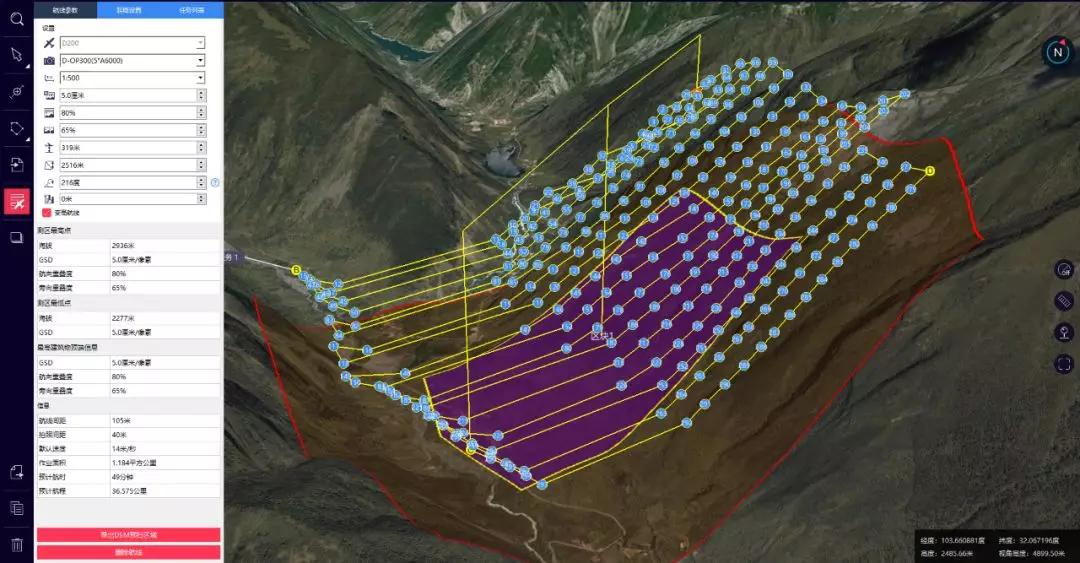
如上图所示,为了解决这种问题,需要专门结合地形设计一种变高航线,最大程度上做到以相对较低且一致的航高,获取测区内GSD相对一致的倾斜数据,满足用户对于高精度、高分辨率的需求。
D200变高航线
(9)建筑高度引入航线设计
航摄飞行过程中,航线设计时主要采用的是地形图的高程信息,未引入人为构建的独立地物、建筑物等高度,若测区出现高度高于相对航高的独立地物或建筑物,很容易出现撞机事故,引发飞机坠毁,严重情况下引起人身财产损失。所以将建筑物的高度引入航线设计中很有必要。
另外,当测区建筑较高的时候,建筑屋顶会在影像中形成较大的投影差,如下图所示,单纯考虑地面物体的重叠度必然导致建筑屋顶出现漏洞,需要结合相对航高、重叠度以及建筑高度等方面的相关因素加以分析。
图1 投影差示意图
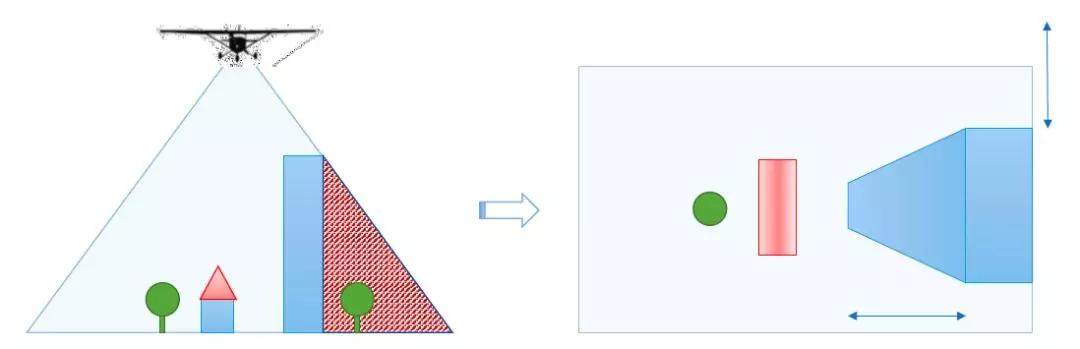
图2 建筑高度与重叠度关系
我们在进行航线设计的时候将建筑高度引入航线设计中,尤其是引入进倾斜航线设计中,在进行航线设计的过程中输入测区的最高建筑的高度,通过调整重叠度,尤其是旁向重叠度,以达到测区最高点以及最高建筑顶部的重叠度都能满足要求,这种航线设计的对策对于保证数据的有效获取,避免模型出现漏洞具有明显的优势。
④倾斜航空影像成果质量检查要求
(1)精度检查
模型精度即为倾斜影像数据的测量值与真实值之间的差值:
检测实景三维模型的精度要利用GPSRTK在测区外业实地测量若干个特征点,并记录WGS84坐标、椭球高及需要拍摄的每个点对应的实地位置。将从实景三维模型中提取每个检查点对应位置的模型坐标与检查点的测量坐标作对比进行精度评估。这是严格计算倾斜影像模型精度的方法。
按照上述方法来评定倾斜影像的模型精度:
倾斜摄影的模型高程精度一般是地面分辨率(GSD)的三倍,如果生成的正射影像的分辨率是5cm,那模型的高程精度基本就是15cm,最大限差为2倍中误差即30cm。
(2)影像重叠度检查
由于倾斜航空影像采取多视匹配的算法进行空三加密处理,要求影像重叠度大才能匹配更多的同名点。一般情况下,倾斜摄影时下视相机的影像设计航向重叠度应不小于70%,但航向重叠度也不宜过大,如果重叠过大,一方面会造成摄影基线变得更短,不仅影响测图精度也会降低效率,另一方面基线变短会增加影像旋偏角超限的可能,一般在70%~80%之间为宜;下视影像旁向重叠度一般应设计为50%~80%,最低不低于30%;侧视影像航向重叠度不低于53%。
(3)影像倾斜角检查
依据机载POS数据检查下视相机的倾斜角度。由于下视相机是垂直摄影,影像倾斜角按照现有大比例尺航空摄影规范执行,即一般不大于2°,若下视影像需进行测图处理时最大不应超过4°。
(4)影像旋偏角检查
倾斜航空影像由于重叠度大,基线短,飞机姿态稍有变化即可能导致旋偏角超限。按照成图要求,下视相机的像片旋偏角一般不大于25°。根据作业经验,在只建模不测图的情况下,旋偏角不大于35°或抽片后旋偏角最大不大于25°即可,但需确保像片航向和旁向重叠度满足要求。
(5)摄区、分区覆盖保证检查
倾斜摄影为了保证摄区外侧也能获取影像,摄区边界覆盖较垂直摄影大。按照2.4节公式计算分区覆盖超出边界线的基线数和航线数的理论值与实际值。实际航摄过程中,一般可在航线旁向方向测区边界范围外增加4~5条航线,以保证左视和右视镜头影像均覆盖全测区范围;在航线航向方向测区边界范围外,每条航线延长1.5 km以上,以保证前视和后视镜头影像均能覆盖全测区范围。
(6)航线弯曲度与航高保持检查
摄区航线弯曲度可依照框幅式数字航空摄影规范执行,航线弯曲度一般不大于1%,当航线长度小于5000 m时,航线弯曲度最大不大于3%。由于倾斜航空摄影的航高一般小于1000 m,因此在航高保持方面要求同一航线上相邻像片的航高差不大于30 m,最大航高与最小航高之差不大于50 m,分区内实际航高与设计航高之差不大于50 m。
(7)影像质量检查
影像质量检查与传统垂直摄影的要求一致,除云、云影、烟、雾、反光等检查项外,还需检查影像像点位移,确保在曝光瞬间造成的像点位移不大于1个像素。
⑤倾斜航空影像的数据整理
倾斜航空影像的数据整理与《数字航空摄影规范第1部分:框幅式数字航空摄影》中7.1中关于文档资料整理的要求有所不同,倾斜摄影有多个相机,因此在相机相对位置关系、像片数据编号、文件存储及激光打印输出等部分存在差异。
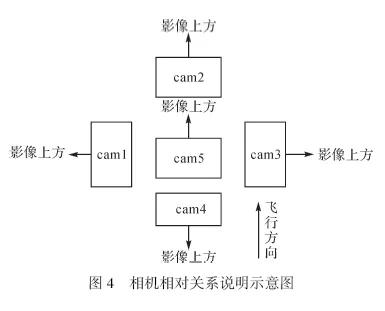
1 相机相对关系说明
针对多镜头倾斜航空摄影,提交资料时需增加相机相对关系的说明文件。以5镜头为例,表示了倾斜数字航摄仪各子相机的相对位置关系,同时影像上方采用箭头标明与飞行方向的关系。相机相对关系说明如图4所示。
2 数据命名
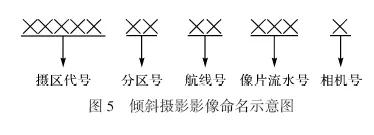
下视影像可按照国家基础航空摄影资料整理的规则命名。侧视影像命名时需参照飞行方向,将4镜头分别命名为国家基础航空摄影资料整理12位+1位,最后一位定义相机相对于垂直相机的位置,如沿飞行方向,下视相机前的影像的最后一位编号为F (front),下视相机后、左、右侧的影像的最后一位编号分别为B (back)、L (left) 和R (right)。倾斜影像命名如图5所示。
(1) 一般以飞行方向为编号的增长方向。
(2) 同一航线内的影像编号不允许重复。
(3) 由于倾斜摄影面积较小,单条航线长度一般不长,像片数一般不会超过1000张,因此影像编号采用流水号3位数字,当有补飞航线时,补飞航线的影像流水号在原流水号基础上加500。
3 文件存储
5镜头获取的影像分为5个文件夹分别存储。每个文件夹命名时,在原有基础上+字母 (L (左)、R (右)、F (前)、B (后))。
4 激光打印输出
根据国家航空遥感影像获取成果资料整理的有关要求,为了便于数据检查和满足归档需要,下视影像需要激光打印输出成纸质相片。与传统垂直摄影相比,倾斜摄影由于分辨率高、重叠度大,造成相片数量骤增。如面积为100 km2的摄区,但下视相机的影像数量就可能超过12000张。如此大量的相片给检查、归档造成一定的困难。
由于倾斜航摄时旁向重叠度设计较大,隔航线的重叠度也至少大于20%。因此,在下视相片激光打印输出时可采取隔航线输出的方式,即抽航线进行打印输出,但不建议航线内抽片输出。
